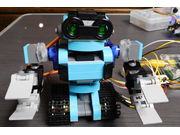
Program post site for everyone


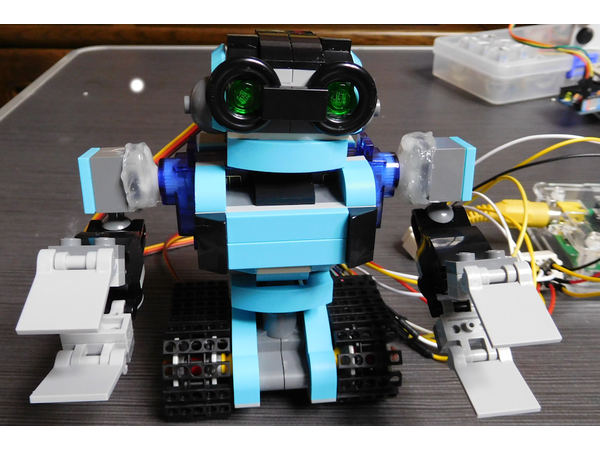
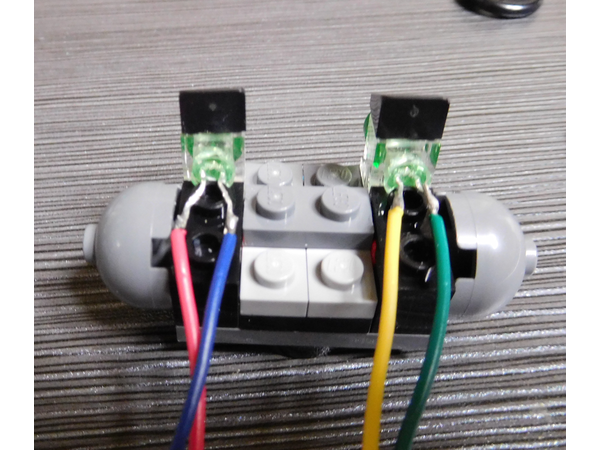
サーボモーター2個 LED2個をレゴ探査ロボットを改造して組み込み、IchigoJamで動かしてみた。
両腕をマニピュレーターにするために2体分のブロックを使用。
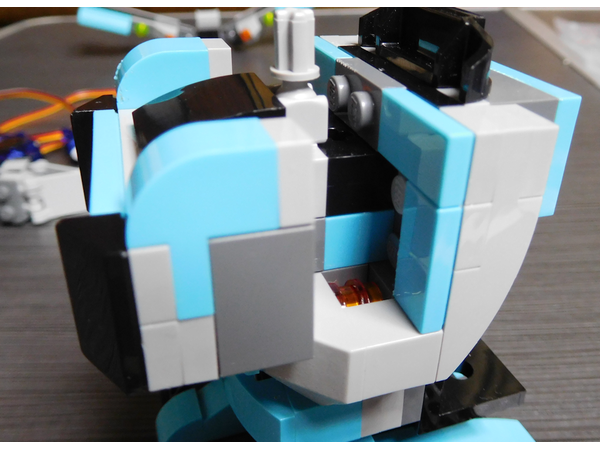
胸部を組み替えて厚みをまし、サーボモーターの設置部を作る。
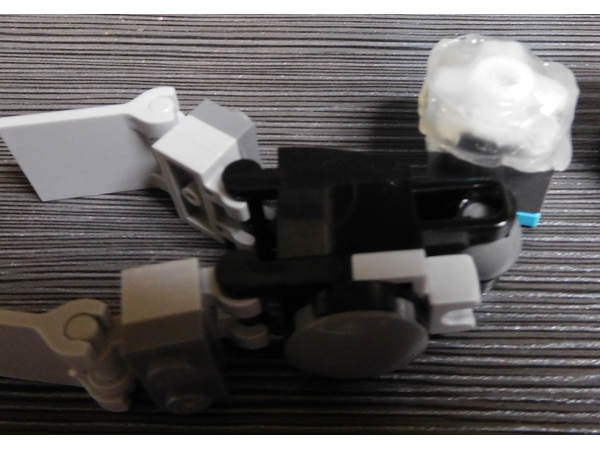
肩関節を右腕のパーツで改造。
サーボモーターの接続パーツをホットボンドで埋め込む。
透明なブロックを頭部に移し、LEDを埋め込む。
ブレッドボードで配線を整理し、IchigoJamに接続。
腕の位置決めと配線確認の初期化プロクラム と 乱数で動作するテストプログラムを作成。
サーボモーターとLEDを組み込んだロボットという構成は、embot https://www.embot.jp/ と同じ。
レゴのロボットを利用することでがっちりとしたロボットを作れます。
レゴのオリジナルのサーボモーターは入手が難しいので、通常のパーツを埋め込んでホットボンドで固定しています。
他の言語であれば関数やブロックを定義しますが、IchigoJamBasicでコントロールするには、OUTでボートの状態を直接設定したり、PWMでパルス幅を50~250の値にする必要があります。
LEDをポートに接続する場合は、電流が流れすぎないように適切な抵抗を入れる必要があります。
PWMの値は0~2000にできますが、大きすぎる値はサーボモーターの破損につながります。ご注意ください。
サーボモーターSG-90の耐荷重は90gです。取り付ける腕の重量が重すぎると、モーター内部が破損する恐れがあります。







10 ‘ROBOT INIT 20 OUT 3:PWM 3,50:PWM 4,180:WAIT 60 30 OUT 1:PWM 3,180:WAIT 60 40 OUT 2:PWM 4,50:WAIT 60 50 OUT 0:PWM 3,180:PWM 4,50:WAIT 60 10 ‘ROBOT TEST 20 CLS 30 OUT 0:PWM 3,180:PWM 4,50 40 WAIT 180 50 OUT RND(4) 60 PWM 3,50+RND(13)10 70 WAIT 30 80 OUT RND(4) 90 WAIT 30 100 OUT RND(4) 110 PWM 4,180-RND(13)10 120 WAIT 30 130 OUT RND(4) 140 WAIT 30 150 GOTO 50

LEGOとIchigoJamの見事なコラボレーション! ありがとうございます。ハード側の改造は大変そうですが、それだけに、完成したときの面白さはヒトシオに思えます!